
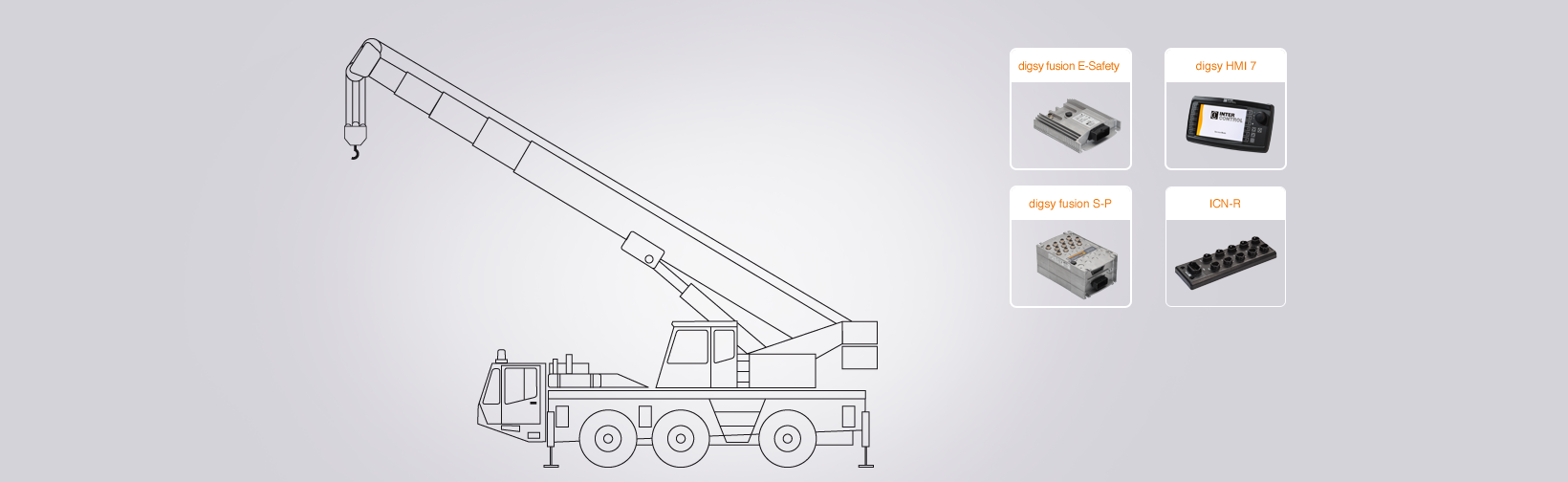
Machine specific functions
- Load calculation and limitation
- Storage of the load tables
- Motion control with ramp functions based on the load tables
- Weight determination via pressure sensors
- Real time joystick data processing
- Decentral activation of the outtriggers with feedback via CAN nodes
- Automatic leveling
- Storage and analysis of the outtrigger configuration
- Complete J1939 control for Engine ECU
- CAN Bus control of hydraulic system
- LVDT feedback of: Rotation angle, erecting angle and telescope length
- Real time analysis of all sensors and command devices
- Acceleration and delay ramps
- Real time control of the actuators
- Color visualization of all current data and set values
- Camera input of up to 6 cameras to display areas that are not directly visible
Control specific functions
- CAN Bus technology (CANopen, J1939, CANopen Safety, CLLI)
- Sensor connection to distributed CAN nodes
- Cost-effective line installation with CAN avoids complicated cable harnesses.
- The across-the-board controller system connects sensors, command devices, hydraulic valves and drive motors.
- Instead of single component selection, the system concept is prepared by a single source provider -
INTER CONTROL - Weather-protected mobile controllers and CAN I/O modules can be mounted inexpensively without switching cabinets
- Robust, scratch-proof, touch display can be operated with gloves
- Color display operator control with language-neutral icons
- Extensive process data memory up to 4 GB
- USB stick, LAN or RS 232 for data transmission to stationary PCs
- Operating and production data analysis and storage